
รู้ลึกเรื่องรถ
ACTIVE WHEEL CARRIER ระบบปรับมุมล้ออัตโนมัติในอุดมคติ

ความเร็ว คือ สุดยอดปรารถนาของนักขับ ตั้งแต่มีรถยนต์เกิดขึ้นบนโลก เพราะบรรดาวิศวกร และนักขับต่างพยายามรีดเค้นความสามารถของเครื่องจักร และมนุษย์ออกมาให้มากที่สุด เพื่อเอาชนะกันให้ได้แม้เพียงเศษเสี้ยววินาที เราพยายามกันเป็นอย่างมากในการพัฒนาเครื่องยนต์ให้มีพละกำลังมากขึ้น ลดน้ำหนักแชสซีส์ให้เบาลง แต่มีความแข็งแกร่งเพิ่มขึ้น ปรับปรุงระบบรองรับให้มีการตอบสนองดีที่สุด พัฒนาพวงมาลัยให้เฉียบคม ฯลฯ ซึ่งทุกปี เราจะได้เห็นนวัตกรรม และเทคโนโลยีเรื่องราวเหล่านี้อยู่เสมอ

แต่สิ่งหนึ่งที่วิศวกรรู้กันดีว่าจุดที่ต้องประนีประนอมในการออกแบบ คือ เรื่อง “การตั้งศูนย์ และมุมล้อ” หรือ “WHEEL ALIGHMENT” เพราะการออกแบบมุมล้อที่กระทำต่อพื้นถนนจริงนั้น เป็นเรื่องที่วิศวกรต้องเลือกระหว่างความทนทานกับประสิทธิภาพในการยึดเกาะ เพราะทั้ง 2 สิ่งวิ่งสวนทางกัน หากคุณต้องการให้ยางใช้งานได้ยาวนาน สึกหรอต่ำ การออกแบบมุมล้อก็ต้องทำให้ไม่กินยาง ในทางกลับกัน ถ้าต้องการให้มีการยึดเกาะสูง สุด ก็ต้องยอมรับว่า มุมล้ออาจจะทำให้ยางสึกหรอเร็วกว่าปกติ ทำให้รถสมรรถนะสูงจะมีรูปแบบของศูนย์ล้อให้ผู้ใช้เลือกระหว่าง แบบที่เหมาะกับการใช้งานบนท้องถนน และแบบที่เหมาะกับการใช้งานในสนามแข่ง

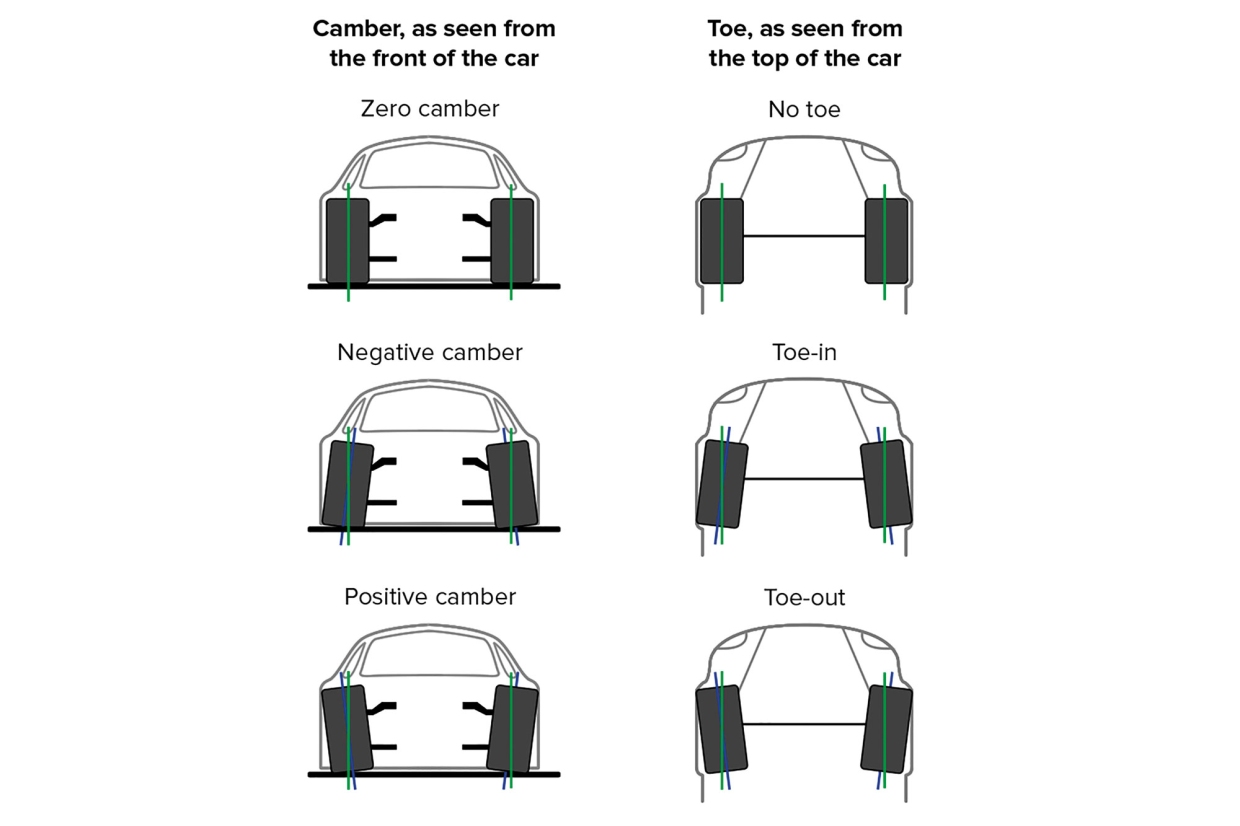
เรื่องของศูนย์ล้อที่ว่านี้ เราจะคุยเกี่ยวกับ 2 มุมที่สำคัญ นั่นคือ “มุมแคมเบอร์” (CAMBER) และ “มุมโท” (TOE) แคมเบอร์ คือ มุมที่ล้อตั้งฉากกับพื้น ตัวอย่างเช่น ถ้าส่วนล่างของล้อหุบเข้าหากันเราจะเรียกว่า มุมแคมเบอร์เป็นบวก (POSITIVE CAMBER) และในทางกลับกัน ถ้าส่วนล่างของล้อถ่าง หรือแบะออกจากกัน เราจะเรียกว่า มุมแคมเบอร์เป็นลบ (NEGATIVE CAMBER)
เรื่องของการเลือกมุมแคมเบอร์ให้ส่งผลกับความเร็วของรถ มุมบวก และลบ มีข้อดีแตกต่างกันไปตามรูปแบบการใช้งาน อาทิ รถที่บรรทุกหนัก, รถใช้งานบนทางฝุ่น หรือเส้นทางทุรกันดาร มักจะนิยมตั้งศูนย์ล้อเป็นบวก (POSITIVE CAMBER) เพราะจะมีเสถียรภาพดีกว่าเมื่อมีน้ำหนักบรรทุก เนื่องจากน้ำหนักของตัวรถจะกดให้ล้อที่ติดกับพื้นถ่างออกมาเอง และช่วยให้การเฉลี่ยน้ำหนักลงที่ยางทำได้ดีกว่า ช่วยลดการสึกหรอของยางขณะบรรทุกได้ดี
สำหรับรถที่นิยมตั้งศูนย์ล้อให้แบะออกล่าง หรือแคมเบอร์เป็นลบ (NEGATIVE CAMBER) นั้นเหมาะกับรถที่ใช้ความเร็วสูง เพราะช่วยเรื่องเพิ่มการยึดเกาะขณะเข้าโค้งด้วยความเร็ว แต่มันจะส่งผลเสียเรื่องความสึกหรอของยาง เพราะยางจะเกิดการสึกหรอมากกว่าปกติในจุดที่สัมผัสพื้นมาก และหากตั้งศูนย์ให้ล้อแบะมากเกินไป จะส่งผลให้รถควบคุมบังคับได้ยาก ไม่เกาะถนนเพราะหน้าสัมผัสยางมีน้อยลง และหากถนนเปียกก็มีโอกาสที่จะเหินน้ำ (AQUAPLANING) ได้ง่าย

ส่วนมุมโท (TOE) นั้นเป็นมุมที่ล้อกระทำกับทิศทางที่รถวิ่ง ถ้าล้อหุบเข้าหากัน เราจะเรียกว่า “โท-อิน” (TOE-IN) หรือมุมโทบวก (POSITIVE TOE) ในทางกลับกัน ถ้าล้อแบะออกจากทิศทางที่รถวิ่ง เราจะเรียกว่า “โท-เอาท์” (TOE-OUT) หรือมุมโทลบ (NEGATIVE TOE) ซึ่งความแตกต่างนั้น จะมีผลในเรื่องของเสถียรภาพในการวิ่งที่แตกต่างกัน โดยรถส่วนใหญ่นั้นมักจะออกแบบให้มีศูนย์ล้อเป็นแบบโท-อิน ถ้ามองจากด้านบน ล้อจะหุบเข้าหากันเป็นเหมือนลูกศรพุ่งไปข้างหน้า ซึ่งจะส่งผลดีกับเสถียรภาพทางตรง และช่วยลดการสึกหรอของยาง และหากเป็นล้อหน้าถ้ามีมุมโท-อิน มากเกินไปก็จะทำให้เลี้ยวยากขึ้น ซึ่งส่งผลให้มีเสถียรภาพในการวิ่งทางตรง การออกแบบศูนย์ล้อแบบโท-อิน จะดีสำหรับแก้ไขอาการท้ายปัด หรือโอเวอร์สเตียร์
ในทางกลับกัน หากตั้งศูนย์ล้อเป็นแบบโท-เอาท์ จะมีแรงต้านมากกว่า ซึ่งทำให้มีแรงยึดเกาะเพิ่มขึ้น โดยเฉพาะเมื่อใช้กับล้อขับเคลื่อน ทำให้เร่งได้ช้าลง แต่มีการยึดเกาะในโค้งดีขึ้น และถ้าใช้กับล้อหน้า มันจะทำให้การเลี้ยวตอบสนองเร็วขึ้น ซึ่งเหมาะกับการแก้ไขอาการหน้าดื้อโค้ง หรืออันเดอร์สเตียร์ แต่ในทางกลับกันเสถียรภาพช่วงความเร็วสูงจะเป็นรองศูนย์ล้อแบบโท-อิน
ถึงตรงนี้จะเห็นว่า มุมล้อ ไม่ว่าแบบใดก็มักจะมีข้อดี ข้อด้อย แตกต่างกันไปแบบได้อย่างเสียอย่าง ดังนั้น หากรถสามารถปรับมุมล้อได้เองขณะขับ เพื่อให้แม่นยำในทางตรง และโดดเด่นในทางโค้ง นั่นคือ แนวคิดในอุดมคติ และนี่คือ สิ่งที่วิศวกรของ LAMBORGHINI (ลัมโบร์กินี) ภูมิใจนำเสนอระบบที่พวกเขาพัฒนาขึ้น ในชื่อ “ACTIVE WHEEL CARRIER”
ปัจจุบันระบบนี้ยังอยู่ในขั้นตอนของงานต้นแบบ และได้ทดลองติดตั้งเพื่อทดสอบบนกับ LAMBORGHINI HURACAN EVO (ลัมโบร์กินี อูรากัน เอโว) ซึ่งเป็นรุ่นขับเคลื่อนล้อหลัง โดยเป็นการพัฒนาร่วมกับวิศวกรของ AUDI (เอาดี) ซึ่งแนวคิดนี้ได้พัฒนาให้ล้อขับเคลื่อน (ล้อหลัง) สามารถปรับมุมแคมเบอร์ได้เอง โดยมุมแคมเบอร์สามารถปรับเป็นบวก ได้มากถึง 2.5 องศา และสามารถแบะออกแบบ แคมเบอร์เป็นลบ ได้ถึง 5.5 องศา ส่วนมุมโท สามารถปรับได้มากถึง 6.6 องศา ทั้งโท-อิน และโท-เอาท์
หัวใจของระบบนี้ คือ มอเตอร์ไฟฟ้าระบบ 48 โวลท์ ที่ใช้ขับเคลื่อนฟันเฟืองที่ติดตั้งเข้ากับ “ดุมล้อหลัง” ที่สามารถปรับเปลี่ยนมุมล้อได้อย่างรวดเร็ว โดยความเร็วของการทำงานมากถึง 60 องศา/วินาที ดังนั้น การปรับจริงที่ทำงานเพียงไม่กี่องศา สามารถทำได้ในเสี้ยววินาทีเท่านั้น และทำงานอัตโนมัติจากข้อมูลที่ประมวลผลได้จากเซนเซอร์ต่างๆ ในรถ โดยมอเตอร์ไฟฟ้าระบบ 48 โวลท์ ทำงานร่วมกับระบบไฟฟ้าแบบ 400 โวลท์ ที่พัฒนาขึ้นใช้กับรถรุ่นพลัก-อิน ไฮบริด และรถไฟฟ้าของค่าย VOLKSWAGEN (โฟล์คสวาเกน) และ AUDI โดยข้อมูลจากเซนเซอร์ทั้งหมดจะถูกใช้งานร่วมกับ ระบบควบคุมเสถียรภาพการทรงตัว (STABILITY CONTROL) ระบบกระจายแรงบิด (TORQUE MANAGEMENT) และระบบอากาศพลศาสตร์ (ACTIVE AERO SYSTEMS)
ผลลัพธ์ที่เกิดขึ้นนั้นน่าทึ่ง เพราะระบบดังกล่าวช่วยลดเวลาต่อรอบในการทดสอบที่สนามต่างๆ ลงได้อย่างน่าอัศจรรย์ ไม่ว่าจะเป็นเวลาต่อรอบที่สนาม NARDO (นาร์โด) ทางตอนใต้ของประเทศอิตาลี ลดลงถึง 2.5 วินาที และเวลาต่อรอบที่สนาม NURBURGRING NORDSCHLEIFE ลดลงถึง 4.8 วินาที !
โดยเหตุผลเกิดจากการที่ล้อหลังสามารถปรับเปลี่ยนมุมล้อที่ดีที่สุด สอดคล้องกับทุกสถานการณ์ แม้ว่าจะเป็นมุมเพียงเล็กน้อย แต่มันก็สามารถยกระดับของการขับขี่ได้อย่างน่าอัศจรรย์ เพราะมันทำให้เข้าโค้งได้ด้วยแรงจีที่เพิ่มขึ้นมากกว่าเดิมถึง 25 % เทียบเท่ากับการเปลี่ยนจากยางสปอร์ทติดรถ ไปใช้ยางประเภทเซมิสลิค เลยทีเดียว

เทคโนโลยีนี้เปิดให้วิศวกรได้ทดลองความเป็นไปได้ใหม่ๆ อาทิ สัดส่วนยางหน้าที่กว้างขึ้น หรือสปริงที่มีความแข็งลดลง ไปจนถึงการใช้ยางหน้าและหลังที่มีเนื้อยางแตกต่างกัน เพื่อหาส่วนผสมที่ลงตัวร่วมกับระบบปรับมุมล้ออัตโนมัตินี้ แต่สิ่งเดียวที่วิศวกรที่ออกแบบระบบนี้กังวล คือ จากสมรรถนะการเข้าโค้งที่ดีขึ้นจนเหมือนจะไร้ขีดจำกัด ซึ่งมันก็เป็นเหมือนดาบสองคม เพราะมันจะสร้างความมั่นใจเกินพิกัดให้cdjผู้ขับขี่นั่นเอง
แน่นอนว่าระบบนี้จะทำงานได้เต็มประสิทธิภาพ เมื่อทำงานในรถที่มีระบบไฟฟ้าแรงดันสูง ดังนั้น จึงเชื่อได้ว่าจะถูกนำมาใช้เป็นอุปกรณ์มาตรฐานของรถรุ่นใหม่ ที่จะมาแทนที่ LAMBORGHINI HURACAN ที่ใช้ขุมพลังแบบ วี 8 สูบ ทวินเทอร์โบ พลัก-อิน ไฮบริด แน่นอน




