
ธุรกิจ
จุฬาฯ เปิดตัว “วีลแชร์เดินได้” Wheelchair Exoskeleton
คณะวิศวกรรมศาสตร์ จุฬาลงกรณ์มหาวิทยาลัย เปิดห้องแลบ โชว์หุ่นยนต์ต้นแบบ Wheelchair Exoskeleton สำหรับผู้สูงอายุ และผู้มีปัญหาด้านการเคลื่อนไหว ให้สามารถขยับลุกจากการนั่งวีลแชร์มายืน และเดินได้ในหุ่นยนต์ตัวเดียว
รศ.ดร.รณพีร์ ชัยเชาวรัตน์ อาจารย์จากสำนักบริหารหลักสูตรวิศวกรรมนานาชาติ คณะวิศวกรรมศาสตร์ จุฬาลงกรณ์มหาวิทยาลัย กล่าวถึงแนวคิดในการสร้าง “ห้องปฏิบัติการหุ่นยนต์” ว่า นี่เป็น Alternative Solution ของการศึกษา ผมสร้างห้องแลบ และสิ่งแวดล้อมที่มีเครื่องมือให้นิสิตได้ประกอบหุ่นยนต์ในเวลาว่างจากการเรียน เราเน้น “Proof of Concept” คือ นิสิตต้องนำเสนอแนวคิดที่อยากทำในที่ประชุม แล้วค่อยทดลองทำ ก่อนที่จะนำนวัตกรรมไปทดสอบกับผู้ใช้งานจริง
“ผมอยากประดิษฐ์วีลแชร์ที่เดินได้ วีลแชร์ปกติเคลื่อนที่ได้ตามทางปกติเท่านั้น แต่ขึ้นรถเมล์ไม่ได้ ขึ้นลงบันไดไม่ได้ ผมเลยมองว่าถ้าวีลแชร์สามารถพับขึ้นมาแล้วช่วยให้ผู้นั่งลุกขึ้นมาเดินได้ ก็จะทำให้ผู้ที่มีปัญหาทางการเคลื่อนไหวเดินได้สะดวกขึ้น”


หุ่นยนต์ตัวนี้ได้รับการสนับสนุนทุนวิจัยจากสำนักการวิจัยแห่งชาติในปี 2564-2565 และล่าสุดได้ผ่านเข้ารอบสุดท้ายในโครงการรางวัลนักเทคโนโลยีรุ่นใหม่ ประจำปี 2567 จัดโดยมูลนิธิส่งเสริมวิทยาศาสตร์และเทคโนโลยีในพระบรมราชูปถัมภ์
หุ่นยนต์ Wheelchair Exoskeleton คืออะไร ?
รศ.ดร.รณพีร์ กล่าวว่า Wheelchair Exoskeleton เป็นหุ่นยนต์สวมใส่บนร่างกายเพื่อช่วยการเคลื่อนไหวของมนุษย์ มีลักษณะเป็นได้ทั้งวีลแชร์ และแปลงเป็นหุ่นยนต์
“ชื่อ Exoskeleton มาจาก 2 คำ คือ Exo แปลว่า ข้างนอก และ Skeleton แปลว่า โครงกระดูก เมื่อรวม 2 คำนี้ด้วยกัน แปลได้ตรงตัวว่า “โครงกระดูกภายนอก” จะว่าไปแล้วไอเดียก็คล้ายกับไอรอนแมน ที่เมื่อสวมใส่แล้วจะช่วยให้ผู้สวมใส่มีพละกำลังมากกว่าเดิม ในทางเทคนิค คือ การใช้เครื่องจักรกลประกอบหุ่นยนต์ให้ผู้สวมใส่สามารถออกแรงได้มากขึ้น”
จาก Concept Design ดังกล่าว ได้ออกแบบชิ้นส่วนทุกชิ้นของหุ่นยนต์อย่างละเอียด โดยใช้โปรแกรม 3 มิติจากคอมพิวเตอร์ และหาซื้อวัสดุเอง ซึ่งอาจารย์รณพีร์เลือกใช้คาร์บอนไฟเบอร์ ที่มีน้ำหนักเบา และผลิตโดยเครื่องพิมพ์ 3 มิติ บางชิ้นส่วนตัดโดยเครื่องกลึง CNC (Computer Numerical Control)
เมื่อผลิตชิ้นส่วนต่างๆ ของหุ่นยนต์ครบแล้ว ก็นำมาประกอบเป็นตัวหุ่น ต่อไปก็เป็นเรื่องของการควบคุมการเคลื่อนไหว ซึ่งแบ่งเป็น 2 ส่วน โดยส่วนแรก คือ ล้อ ซึ่งได้กลุ่มนิสิตมาเขียนโปรแกรมล้อหน้าให้สามารถวิ่งตรง และเลี้ยวโค้งได้ ส่วนที่สอง เป็นมอเตอร์ควบคุมข้อต่อสะโพกกับหัวเข่า ที่อาจารย์รณพีร์เขียนโปรแกมควบคุมเอง
“หุ่นยนต์มีลักษณะเป็นหุ่นยนต์ไฮบริดแบบใหม่ ผสมผสานรถเข็น และ Exoskeleton เข้าด้วยกัน ขาช่วงล่าง สามารถเปลี่ยนโหมดการใช้งานได้ระหว่างนั่ง และเดิน โดยใช้มอเตอร์ช่วยในการเคลื่อนไหวของข้อต่อสะโพก และหัวเข่า ส่วนข้อต่อข้อเท้าเป็นข้อต่ออิสระ ไม่มีการขับเคลื่อน ล้อซ้าย และขวาสามารถเก็บเข้าไปในส่วนขาส่วนล่าง เพื่อเปลี่ยนเป็นท่าเดิน หรือข้ามสิ่งกีดขวาง”

ผสานกลไกเข้ากับกายวิภาคมนุษย์
กว่าจะเป็นหุ่นยนต์ต้นแบบ Wheelchair Exoskeleton รศ.ดร.รณพีร์ ผสานความรู้ทั้งด้านวิศวกรรมศาสตร์การประดิษฐ์หุ่นยนต์ และสรีรศาสตร์ของมนุษย์เข้าด้วยกัน
“การออกแบบหุ่นยนต์ประเภท Exoskeleton ต้องคำนึงถึงอวัยวะของผู้สวมใส่ และหุ่นให้ไปด้วยกันได้ สวมแล้วไม่ยืด หรือไม่หด ไม่ระคายผิวหนัง ทุกครั้งที่เหวี่ยงขาจริง Exoskeleton ก็ต้องเหวี่ยงไปด้วย เวลางอหัวเข่า หัวเข่าของหุ่นยนต์ก็ต้องงอไปพร้อมกัน”
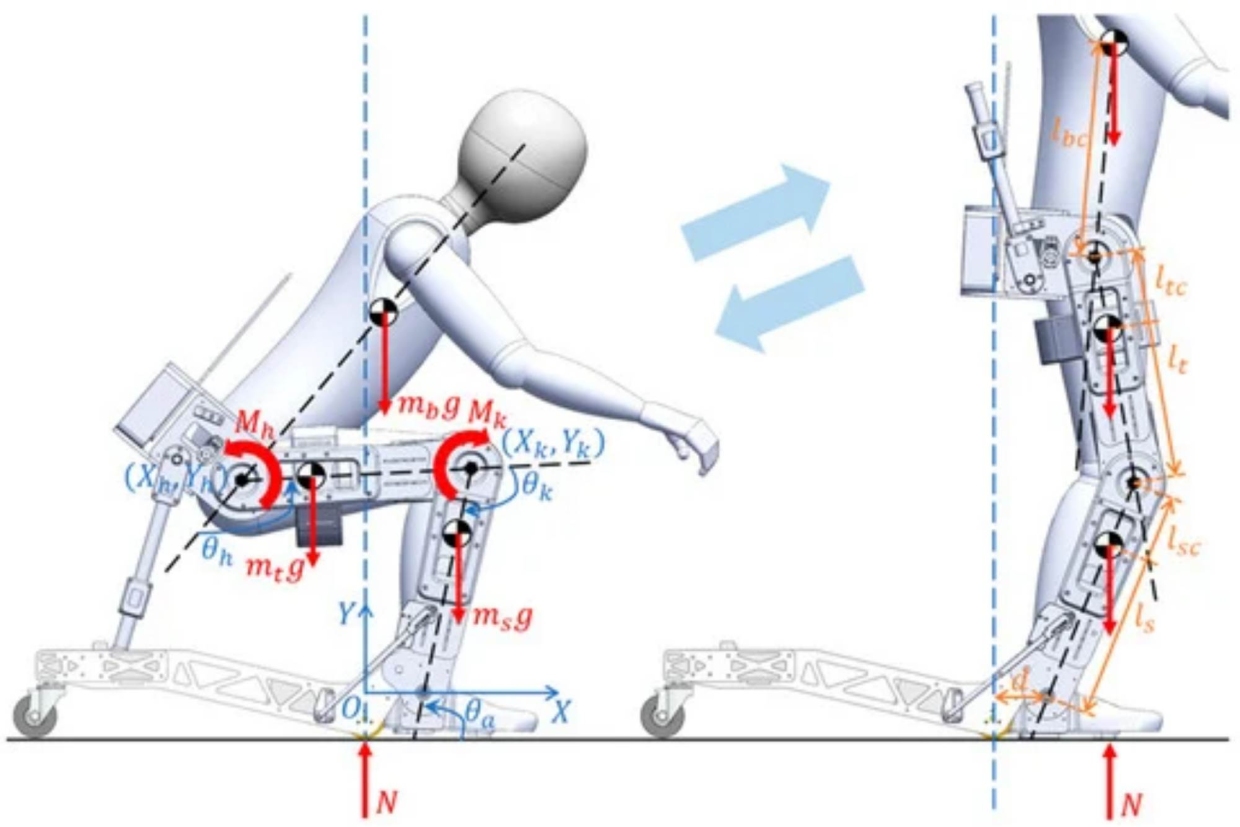
โครงร่างการออกแบบหุ่นยนต์ Wheelchair Exoskeleton
การออกแบบใช้หลักการ Kinematics Compatibility หรือความเข้ากันได้เชิงจลศาสตร์ในการออกแบบหุ่นสวมใส่บนร่างกาย กระดูกคนเป็นกระดูกถ้วยกับกระดูกก้อนที่มาสไลด์กัน แต่กลไกมอเตอร์ หมุนรอบแกนหมุนแกนเดียว เมื่อเอามอเตอร์มาติด จะไม่สอดคล้องกับสรีระคนโดยตรง เราจึงออกแบบข้อต่อหัวเข่าให้เป็น Linkage เพื่อให้เส้นทางการเคลื่อนที่ของจุดศูนย์กลางการหมุน สามารถเลียนแบบกระดูกจริง ข้อต่อที่มีการงอขาเยอะๆ ก็ใช้ Four-bar Linkage เพื่อให้จุดหมุนเปลี่ยนไปตามข้อต่อได้
นอกจากนี้ ยังใช้ความรู้เรื่อง Biomechanic หรือชีวกลศาสตร์ ซึ่งสามารถคำนวณแรงบิดที่เกิดขึ้นจากรอบข้อเท้า หัวเข่า และสะโพกได้ เพื่อนำข้อมูลไปสร้างหุ่นยนต์ที่เหมาะสมกับสรีระของคน
ในแง่ความสวยงาม คงต้องการความรู้ฝั่งสถาปัตยกรรมศาสตร์มาช่วยออกแบบหุ่นยนต์ และเมื่อจะนำหุ่นยนต์ไปใช้งานจริง ฝ่ายสหเวชศาสตร์คงต้องเข้ามาช่วยแนะนำผู้สูงอายุ และผู้ป่วยต่อไป
ขณะนี้ยังอยู่ระหว่างพัฒนาหุ่นยนต์ Wheelchair Exoskeleton ต้นแบบตัวที่ 2 โดยแก้ไขเรื่องการนั่ง การลุกให้มั่นคง และเดินได้สะดวกกว่าเดิม และกำลังอยู่ระหว่างการยื่นขอจดทรัพย์สินทางปัญญา ขั้นตอนต่อจากนี้จะเป็นการทดสอบการใช้งานจริงกับผู้ป่วย และผู้สูงอายุ


